| 光学成像原理简介
一个成像系统主要包含以下几个要素:
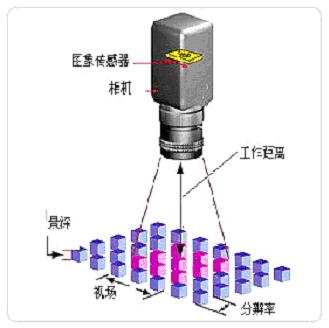
・视场 :能够在显示器上看到的物体上的部分 ・分辨率 :能够最小分辨的物体上两点间的距离
・景深:成像系统能够保持聚焦清晰的最近和最远的距离之差
・工作距离:观察物体时,镜头最后一面透镜顶点到被观察物体的距离
・畸变 :由镜头所引起的光学误差,使得像面上各点的放大倍数不同,导致变形
・视差 :是由传统镜头引起的,在最佳聚焦点外物体上各点的变化,远心镜头可以 解决此题。
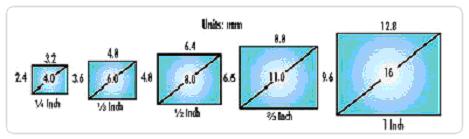
 ・图像传感器尺寸 :图像传感器(一般是 ccd 或 cmos )有效的工作区域,一般指的是水平尺寸。对所希望的视场来说,这个参数对决定预先放大倍数( pmag )是很重要的。多数图像传感器的长度与宽度之比是 4:3 ,如下图所示。 ・图像传感器尺寸 :图像传感器(一般是 ccd 或 cmos )有效的工作区域,一般指的是水平尺寸。对所希望的视场来说,这个参数对决定预先放大倍数( pmag )是很重要的。多数图像传感器的长度与宽度之比是 4:3 ,如下图所示。
・预放大倍数 :是指视场与图像传感器尺寸的比值,这个过程是由镜头来完成的
・系统放大倍数 :是指显示器上的图像与实际物体大小的比值,也就是整个系统的放大倍数。它也可以写成预放大倍数与电子放大倍数的乘积,而电子放大倍数则是显示器尺寸与图像传感器尺寸的比值。
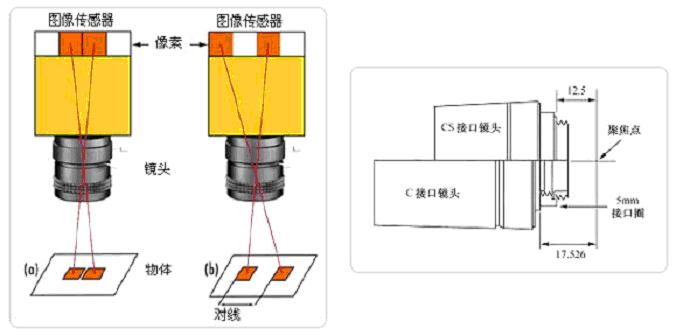
・分辨率 :分辨率的大小表征了对物体上细节的辨别能力,下图简单的说明了物体上的两个方块区域成像到 cmos/ccd相机上。可以看出,因为图像传感器上像素间的距离已经确定,如果想要区分物体上很近的两点,它们之间必须隔开一定的距离。
与分辨率相关的术语有以下几个:
・每毫米对线( lp/mm ) :如上图所示,一对线是指一个红色的区域和一个空白的区域。分辨率就是用每毫米上对线的数量来表示,因此分辨率常常被看作是空间频率。这个频率的倒数是指最小可分辨的物体上两点间的距离,用毫米来表示。这个参数可以用来表征镜头或者相机的分辨率。
・像素数 :数码相机的分辨率也可以用图像传感器的像素数来表示。如图所示,一对线与两个像素相对应,换句话说,如果要使两个红色区域分开,就必须一个像素贡献于红色区域,一个像素贡献于红色区域间的空白。
・tv 线: 在模拟制式 ccd 相机中,用成像后可分辨的黑白线的数目来表示。这个值是没有单位的,不能够与每毫米对线 相混淆。
・c/cs 接口: 这是工业界 ccd 和 cmos 相机普遍使用的螺纹标准,螺纹规格是 32 tpi ,即每英寸 32 线。如下图所示,对 c 接口,从后凸沿到像平面的距离是 17.526mm ;而对 cs 接口,从后凸沿到像平面的距离是 12.5mm 。
一个 c 接口的镜头可以通过一个 5mm 的接圈接到 cs 接口的相机上。
光学镜头相关知识
・焦点与焦距: 焦点是指一簇平行于光轴的平行光经过透镜以后,汇聚成的一点。而焦距则是镜头的主平面到焦点之间的距离,由于镜头一般有数片凸透镜和凹透镜组成,所以无法直接判别主平面的位置但通过严格的计算可以得出。要注意后焦面与焦平面的区别,后焦面是指镜头的最后一片透镜到成像面的距离。
・光圈系数: 光圈是用来控制镜头进光量的大小,在光学上称作孔径光阑。 对于不同的镜头而言,光阑的位置不同,焦距不同,入射瞳直径也不相同,用孔径来描述镜头的通光能力,无法实现不同镜头的比较。所以一般采用相对孔径的方法来表示,即相对孔径 = [ 镜头焦距 ] / [ 入射瞳直径 ] = f/d 在成像系统中,对光圈的调节是很重要的,它可以控制进光量,调节曝光;同时,减小光圈能够提高系统的景深,并提高成像的质量。
|